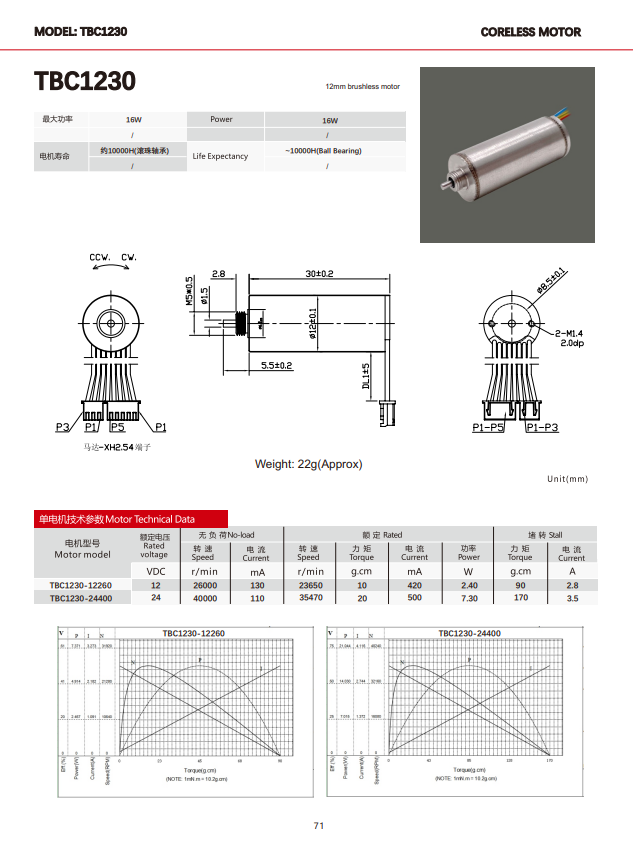
Động cơ BLDC siêu nhỏ TBC1230 12V 24V 12mm tuổi thọ cao, tốc độ cao, không chổi than, không lõi, thay thế động cơ Maxon.





1. Hiệu suất cao và tiết kiệm năng lượng, tuổi thọ cực dài
Thiết kế cốc rỗng không chổi than loại bỏ hoàn toàn tổn thất ma sát chổi than và tổn thất dòng điện xoáy trong lõi, với hiệu suất chuyển đổi năng lượng >85% và sinh nhiệt cực thấp. Kết hợp với vòng bi gốm chống mài mòn, tuổi thọ có thể đạt hơn 10.000 giờ, phù hợp với các khớp robot hoặc thiết bị tự động hóa cần hoạt động 24 giờ mỗi ngày.
2. Thu nhỏ và trọng lượng nhẹ
Đường kính chỉ 12mm, trọng lượng <30g và mật độ công suất cao tới 0,5W/g, phù hợp với các tình huống hạn chế về không gian (như khớp ngón tay robot siêu nhỏ, mô-đun điều khiển nội soi).
3. Điều khiển tốc độ cao và độ chính xác cao
Tốc độ không tải có thể đạt 20.000-40.000 vòng/phút (tùy thuộc vào điện áp và điều chỉnh tải), hỗ trợ điều chỉnh tốc độ chính xác (PWM/điện áp tương tự), độ dao động tốc độ <1%, độ chính xác mô-men xoắn ±2%, và thích ứng với các yêu cầu lập kế hoạch quỹ đạo robot hoặc định vị dụng cụ chính xác.
4. Quán tính cực thấp, phản hồi nhanh
Rôto không lõi có quán tính quay chỉ bằng 1/5 so với động cơ chổi than truyền thống, và hằng số thời gian cơ học nhỏ hơn 5ms, có thể đạt được khả năng khởi động/dừng và chuyển động ngược chiều ở mức mili giây, đáp ứng nhu cầu kẹp tốc độ cao hoặc rung động tần số cao.
5. Khả năng hoạt động êm ái và chống nhiễu
Không phát tia lửa chổi than và không gây nhiễu điện từ (đạt chứng nhận CE), độ ồn khi hoạt động <35dB, phù hợp với môi trường nhạy cảm với điện từ hoặc các tình huống yêu cầu tương tác giữa người và máy tính.
1. Khả năng tương thích điện áp rộng
Hỗ trợ đầu vào DC 12V/24V, tương thích với pin lithium, siêu tụ điện hoặc bộ ổn áp, tích hợp mạch bảo vệ quá áp/ngược cực để đảm bảo an toàn cho thiết bị.
2. Mô-men xoắn cao và khả năng thích ứng với hộp số
Mô-men xoắn định mức 50-300mNm (có thể tùy chỉnh), mô-men xoắn đầu ra có thể đạt 3N·m sau khi tích hợp hộp số hành tinh, tỷ số truyền giảm từ 5:1 đến 1000:1, đáp ứng yêu cầu mô-men xoắn cao ở tốc độ thấp hoặc tải nhẹ ở tốc độ cao.
3. Cấu trúc chính xác hoàn toàn bằng kim loại
Vỏ ngoài được làm bằng nhôm hàng không, các bánh răng bên trong có thể làm bằng thép không gỉ hoặc hợp kim titan, có khả năng chống ăn mòn và tản nhiệt tốt. Phạm vi nhiệt độ hoạt động từ -20℃ đến +85℃, có thể thích ứng với môi trường khắc nghiệt.
4. Khả năng tương thích điều khiển thông minh
Hỗ trợ cảm biến Hall, bộ mã hóa từ tính hoặc phản hồi lưới, tương thích với giao thức truyền thông CANopen và RS485, có thể kết nối liền mạch với hệ thống điều khiển ROS hoặc PLC và thực hiện điều khiển vị trí/tốc độ vòng kín.
5. Thiết kế dạng mô-đun
Có các phiên bản trục rỗng hoặc trục kép để tạo điều kiện thuận lợi cho việc tích hợp bộ mã hóa quang điện hoặc định tuyến cáp, tiết kiệm không gian bên trong thiết bị.
1. Robot
Robot công nghiệp: Khớp nối cánh tay robot SCARA, trục gắp của robot Delta, động cơ servo lái cho xe tự hành AGV.
Robot dịch vụ: khớp ngón tay của robot hình người, mô-đun điều khiển đầu robot dẫn đường.
Robot siêu nhỏ: động cơ côn trùng sinh học, động cơ đẩy robot kiểm tra đường ống.
2. Dụng cụ y tế và dụng cụ chính xác
Thiết bị phẫu thuật: kẹp phẫu thuật xâm lấn tối thiểu có cơ cấu đóng mở, dụng cụ điều chỉnh tiêu cự của thiết bị điều trị laser nhãn khoa.
Thiết bị phòng thí nghiệm: Máy PCR có chức năng xoay khay mẫu, mô-đun tự động lấy nét cho kính hiển vi.
3. Thiết bị điện tử tiêu dùng và phần cứng thông minh
UAV: động cơ ổn định gimbal, servo cánh gập.
Thiết bị đeo được: động cơ phản hồi xúc giác của đồng hồ thông minh, động cơ điều chỉnh tiêu cự của kính AR.
4. Tự động hóa ô tô và công nghiệp
Điều khiển chính xác trong ô tô: điều chỉnh góc chiếu màn hình HUD gắn trên xe, hệ thống điều khiển vi mô bướm ga điện tử.
Kiểm tra công nghiệp: cánh tay robot xử lý tấm bán dẫn, điều khiển lượng keo đầu ra của máy phân phối chính xác.